
CAN short form of Controlled Area Network is a standard serial communication protocol used extensively in Automotive embedded applications. This was developed by Robert Bosch in 1986. This is a bus which is used to communicate between various sections of the automobile. If you take the case of a bus or a car, there will be several control units with the main control unit. Communication between these units is a must for the operation of the vehicle. CAN is the interface which works best here. It is a message based protocol intended for automobile industry but also used across industrial environments. CAN2.0 is the latest version of the CAN bus protocol and is widely in use. CAN is one of the protocol used in on-board diagnostics (OBD) protocol.
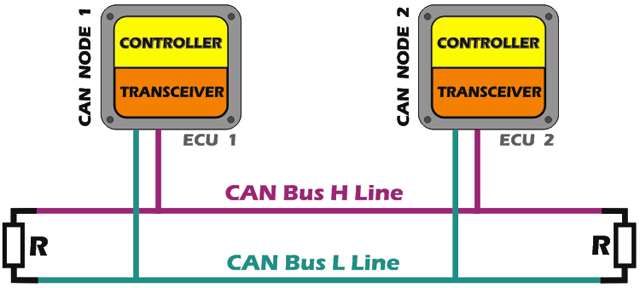
Simple CAN architecture with two nodes is as below:

Several standards associated with CAN are:
CAN2.0:
CAN2.0 has to parts. Part A is for the standard format and is used with 11-bit identifier. Part B is for extended format is used with 29-bit identifier. CAN devices using 11-bit identifier is called CAN2.0A device and CAN devices using 29-bit identifier is called CAN2.0B device.
ISO 11898:
ISO 11898-1 covers data link layer
ISO 11898-2 covers physical layer for high speed CAN
ISO 11898-3 covers physical layer for low speed fault-tolerant CAN.
CAN FD 1.0:
Released by CAN which has flexible data rate included in the protocol and is compatible with CAN 2.0.
Simple CAN architecture with two nodes is as below:
Several standards associated with CAN are:
CAN2.0:
CAN2.0 has to parts. Part A is for the standard format and is used with 11-bit identifier. Part B is for extended format is used with 29-bit identifier. CAN devices using 11-bit identifier is called CAN2.0A device and CAN devices using 29-bit identifier is called CAN2.0B device.
ISO 11898:
ISO 11898-1 covers data link layer
ISO 11898-2 covers physical layer for high speed CAN
ISO 11898-3 covers physical layer for low speed fault-tolerant CAN.
CAN FD 1.0:
Released by CAN which has flexible data rate included in the protocol and is compatible with CAN 2.0.
Few important points about CAN are:
- CAN is multi-master protocol
- Twisted pair cable is used for communication in the physical media
- The control units that are connected by CAN are called Nodes
- All nodes are connected to each other through a two wire bus.
- The CAN wires are 120 Ω nominal twisted pair.
- High level of security
- Low cost of implementation
- Low latency time in communication
Applications:
- Engine control systems (ECU)
- Sensors
- Industrial
Full-forms:
SAE - Society of Automotive Engineers
 ]]>
]]>




{kind=link}
0 Comments